浪潮AI深度推进AI算法在自动驾驶中的应用 以第一的成绩通过NuScenes 评测
目前,人工智能技术已经被广泛应用到不同行业中,自动驾驶领域也不例外。据了解,浪潮AI团队一直都对AI算法在自动驾驶中的应用保持高度关注,并致力于用软硬件的算法和技术创新推动行业的进步,打造更多优秀的成果。
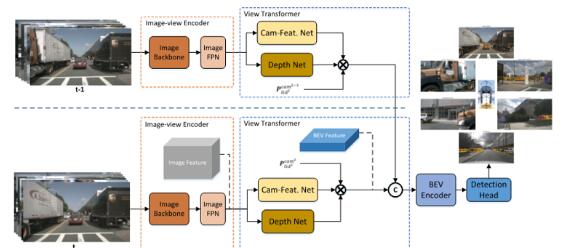
日前,浪潮AI在自动驾驶感知权威数据集 NuScenes 评测中,自研算法 DABNet4D 获得 0. 624 的NDS精度,位列Camera-only榜单第一名。
本次浪潮DABNet4D算法所登顶的自动驾驶NuScenes榜单,其数据集包含波士顿和新加坡两大城市收集的大约15小时的驾驶数据,覆盖了城市、住宅区、郊区、工业区各个场景,也涵盖了白天、黑夜、晴天、雨天、多云等不同时段不同天气状况。数据采集传感器包括了6个相机、1个激光雷达、5个毫米波雷达、以及GPS和IMU,具备360°的视野感知能力。

NuScenes数据集提供二维、三维物体标注、点云分割、高精地图等丰富的标注信息。目前,基于NuScenes数据集的评测任务主要包括3D目标检测(3D object Detection)、3D目标跟踪(3D object Tracking)、预测轨迹(prediction trajectories)、激光雷达分割(Lidar Segmentation)、全景分割和跟踪(lidar Panoptic segmentation and tracking)。其中3D目标检测任务备受研究者关注,自从NuScenes挑战赛公开以来至今,已提交220余次结果。
浪潮DABNet4D算法在训练与评测过程中使用的底层硬件支撑是浪潮NF5488A5 AI服务器。开发过程中,模型在训练集上进行单次训练运行 20 个 epochs(without CBGS),需要耗费 约360 个 GPU 小时。
而为了满足此类算法超高的AI算力需求,浪潮信息提供集群解决方案,采用 Spine-Leaf 的结构进行节点扩展,集成超 2000 GPU 卡集群,达到 90% 的扩展性。同时,该评测也是在 AIStation 的平台基础上进行开发,有效加速了浪潮DABNet4D算法的开发与训练。
未来,基于LiDAR、相机等多源感知融合算法将有力地提升模型的检测精度,同时,Occupancy network、Nerf等先进算法模型也会逐步应用于自动驾驶感知模型的开发与训练中。
自动驾驶数据量急剧增大、自动驾驶感知模型复杂度逐步提升,以及模型更新频率逐渐加快,都将推动自动驾驶的蓬勃发展,也必然带来更大的模型训练算力需求,浪潮AI也将继续推动技术创新,持续促进智能驾驶系统的升级。
来源:IT时代网
IT时代网(关注微信公众号ITtime2000,定时推送,互动有福利惊喜)所有原创文章版权所有,未经授权,转载必究。
创客100创投基金成立于2015年,直通硅谷,专注于TMT领域早期项目投资。LP均来自政府、互联网IT、传媒知名企业和个人。创客100创投基金对IT、通信、互联网、IP等有着自己独特眼光和丰富的资源。决策快、投资快是创客100基金最显著的特点。
热门文章
精彩评论
 小何华为现在牛的不只是设备商了,,华为的手机现在也是全球销量不错,国内也算是老大了,之前用小米,,现在都改华为了。。产品确实不错。
小何华为现在牛的不只是设备商了,,华为的手机现在也是全球销量不错,国内也算是老大了,之前用小米,,现在都改华为了。。产品确实不错。- 小何三星手机在中国还有市场吗?看看现在满大街的vivo和oppo ,,华为,,小米线下店,,就是知道三星的市场基本没有了。。
- 小何滴滴打车现在也没有之前那么火了,,补贴也少了。。
- 小何今日头条要把腾讯的地方各频道给霸占了。。